KI und Robotik
Wir entwickeln und implementieren Autonomie in großem Maßstab in Fahrzeugen, Robotern und mehr. Wir sind davon überzeugt, dass ein auf fortschrittlicher KI basierender Ansatz für Vision und Planung, der durch den effizienten Einsatz von Inferenz-Hardware unterstützt wird, der einzig gangbare generelle Lösungsweg für Voll-Selbstständiges Fahren, 2-beinige Roboter und mehr darstellt.
Tesla Optimus
Ihre Aufgabe ist die Erstellung eines universellen, autonomen humanoiden Roboters mit zwei Beinen, der unsichere, sich wiederholende oder langweilige Aufgaben ausführen kann. Um dieses Ziel zu erreichen, müssen Software-Stacks aufgebaut werden, die Balance, Navigation, Wahrnehmung und Interaktion mit der physischen Welt ermöglichen. Wir suchen Ingenieure für Deep Learning, Computer Vision, Bewegungsplanung, Steuerungen, Mechanik und Software, um einige unserer schwierigsten technischen Herausforderungen zu lösen.

FSD-Chip
Sie werden an der Entwicklung von KI Inferenz-Chips mitarbeiten, die unsere Software für Voll-Selbstständiges Fahren unterstützen. Dabei werden Sie jede kleine architektonische und mikroarchitektonische Verbesserung abwägen, während Sie gleichzeitig die Silizium-Performance pro Watt maximieren. In diesem Rahmen führen Sie Topologie-, Timing- und Leistungsanalysen der Konfiguration durch. Zum Testen von Funktionalität und Leistung konzipieren Sie robuste Tests und Bewertungsmuster. Sie implementieren Treiber, um den Chip zu programmieren und mit ihm zu kommunizieren, wobei der Schwerpunkt auf Leistungsoptimierung und Redundanz liegt. Schließlich validieren Sie den Siliziumchip und bringen ihn zur Serienproduktion in unseren Fahrzeugen.

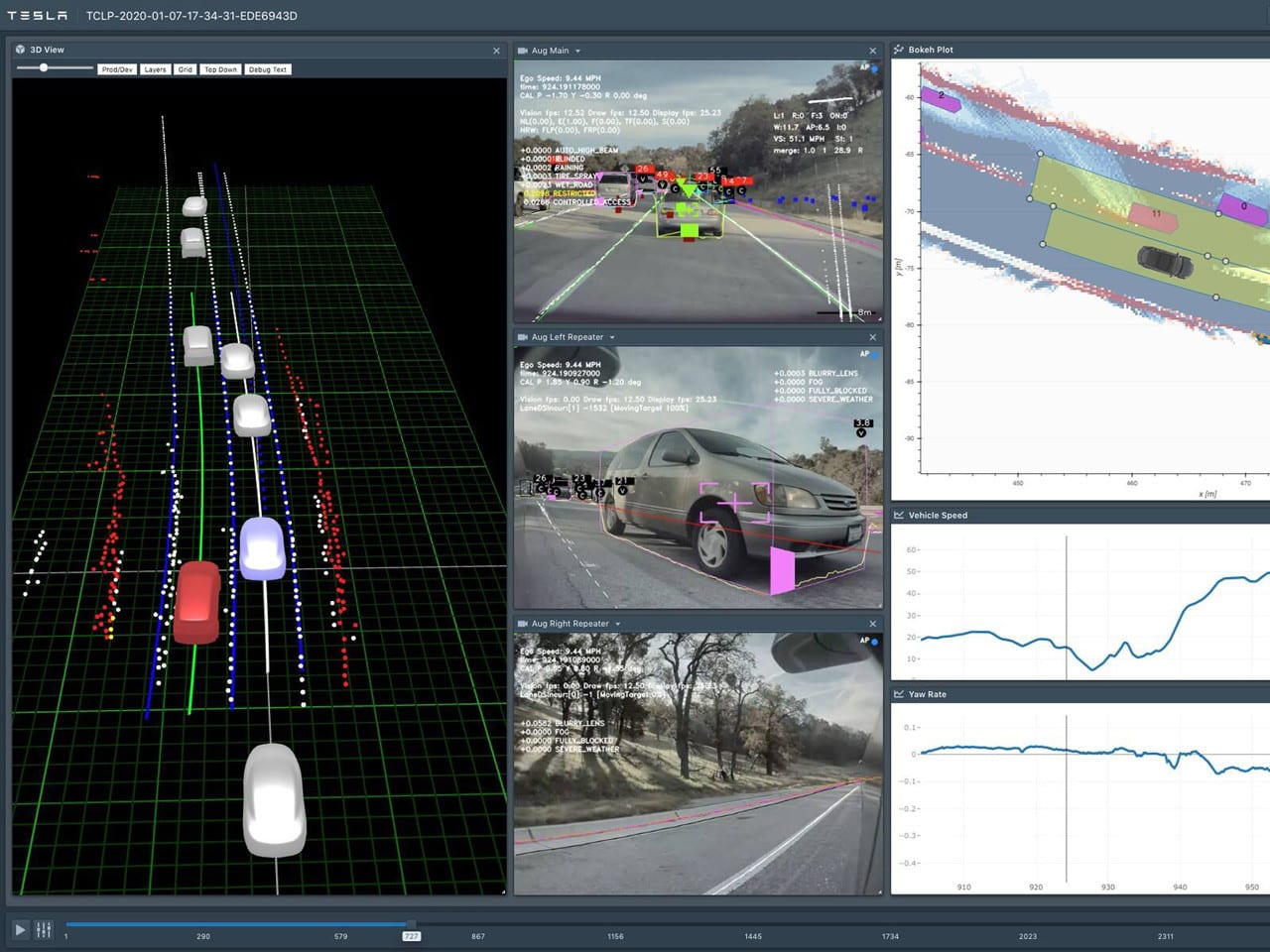
Neuronale Netze
Wir wenden modernste Forschung an, um tiefe neuronale Netzwerke auf Probleme von der Wahrnehmung bis zur Kontrolle zu trainieren. Unsere Netzwerke pro Kamera analysieren Rohbilder, um semantische Segmentierung, Objekterkennung und monokulare Tiefenschätzung durchzuführen. Unsere Netzwerke aus der Vogelperspektive erfassen Videos von allen Kameras, um das Straßenlayout, die statische Infrastruktur und 3D-Objekte direkt in der Draufsicht anzuzeigen. Unsere Netzwerke lernen von den kompliziertesten und vielfältigsten Szenarien der Welt und beziehen sie iterativ aus unserer Flotte von Millionen von Fahrzeugen in Echtzeit. Der vollständige Aufbau neuronaler Autopilot-Netzwerke umfasst 48 Netzwerke, für deren Training 70.000 GPU-Stunden benötigt werden 🔥. Zusammen geben sie zu jedem Zeitschritt 1.000 verschiedene Tensoren (Vorhersagen) aus.
Autonomie-Algorithmen
Sie werden an der Entwicklung von Kernalgorithmen mitwirken, die das Fahrzeug steuern, indem sie eine detailgetreue Darstellung der Umgebung erstellen und die Spurführung in diesem Raum planen. Um die neuronalen Netze so zu trainieren, dass sie Vorhersagen in solchen Darstellungen treffen können, erzeugen Sie algorithmisch genaue und großflächige Topologie-Wahrheitsdaten, wobei die Informationen der Fahrzeugsensoren über Raum und Zeit hinweg kombiniert werden. Sie wenden hochmoderne Techniken an, um ein robustes Planungs- und Entscheidungsfindungssystem zu erstellen, das in komplizierten, realen Situationen unter Unsicherheit funktioniert. Und Sie bewerten Ihre individuellen Algorithmen auf die gesamte Tesla-Flotte skaliert.
Code-Grundlagen
Durchsatz, Latenzzeit, Korrektheit und Determinismus sind die Hauptkennzahlen, für die wir unseren Code optimieren. Sie erstellen die Software-Grundlagen für Voll-Selbstständiges Fahren auf den untersten Ebenen des Stacks und integrieren diese nahtlos in unsere kundenspezifische Hardware. Sie implementieren hochzuverlässige Bootloader mit Unterstützung von Over-the-Air-Updates und rufen angepasste Linux-Kernel auf. Sie schreiben schnellen, speichereffizienten Code auf niedriger Ebene, um hochfrequente, großvolumige Daten von unseren Sensoren zu erfassen und an mehrere Verbraucherprozesse weiterzugeben — ohne die Zugriffslatenzzeiten auf den zentralen Speicher zu beeinträchtigen oder kritische Funktionscodes aus den Zentralprozessor-Zyklen zu entfernen. Sie schöpfen die Rechenleistung durch Pipelining über eine Vielzahl von Hardware-Verarbeitungseinheiten voll aus, die wiederum über mehrere System-on-Chips verteilt sind.

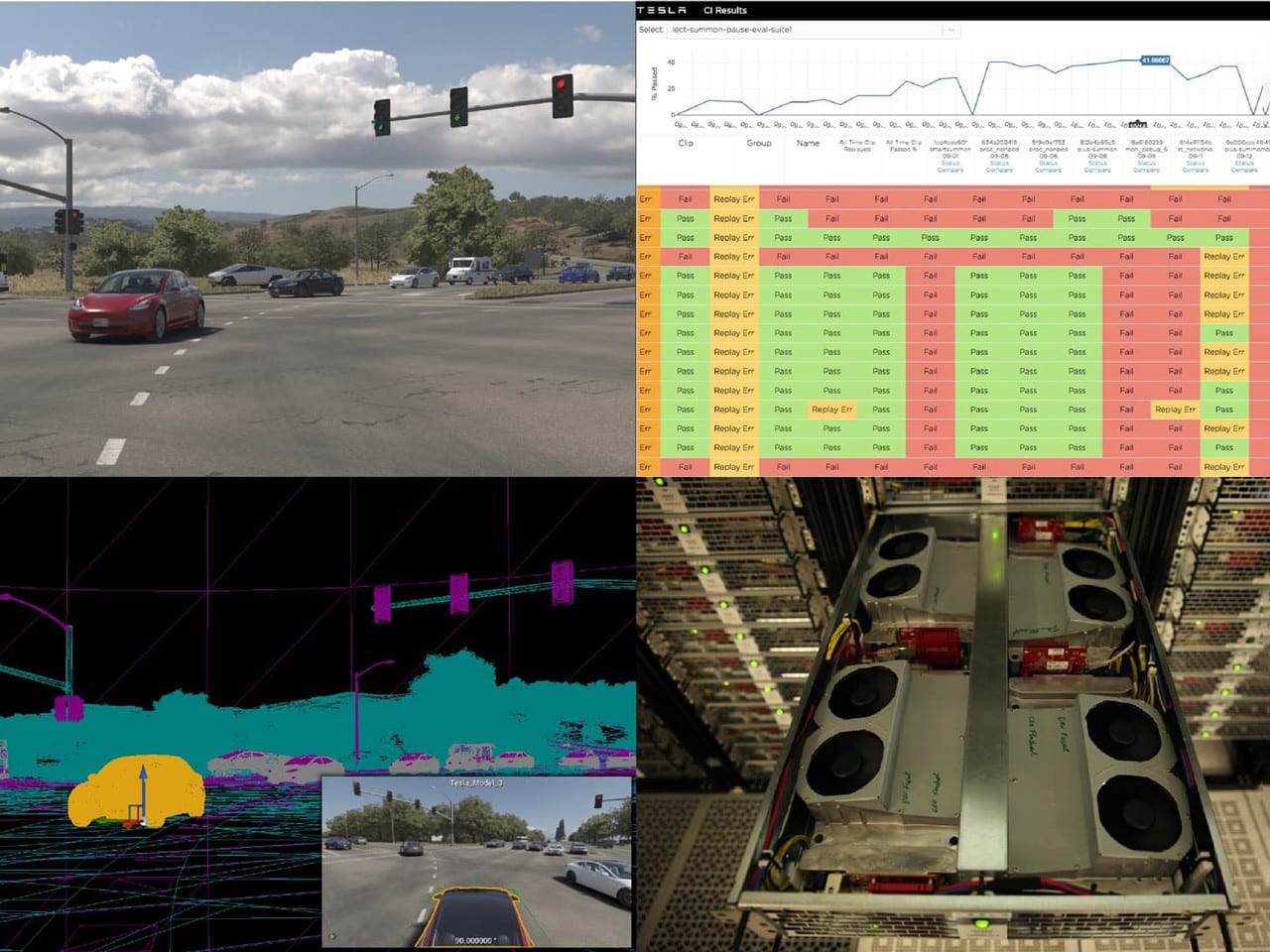
Infrastruktur für Evaluierung
Sie erstellen Hardware-in-the-Loop-Evaluierungstools für offene und geschlossene Regelkreise sowie eine umfassende, skalierbare Infrastruktur, um das Innovationstempo zu beschleunigen, Leistungsverbesserungen zu verfolgen und Rückschritte zu verhindern. Sie nutzen anonymisierte charakteristische Videoclips aus unserer Fahrzeugflotte und integrieren diese in große Testfallgruppen. Sie schreiben Code, der unsere reale Umgebung simuliert und hochrealistische Grafiken erstellt, sowie andere Sensordaten, die unsere Software für Voll-Selbstständiges Fahren für Live-Debugging und automatisierte Tests benötigt.
Gestalten Sie die Zukunft der künstlichen Intelligenz
Tesla wird die in diesem Formular angegebenen Informationen verwenden, um Ihre Anfrage gemäß den Tesla Datenschutzhinweisen für Talente zu bearbeiten.