AI & Robotics
We develop and deploy autonomy at scale in vehicles, robots and more. We believe that an approach based on advanced AI for vision and planning, supported by efficient use of inference hardware, is the only way to achieve a general solution for Full Self-Driving, bi-pedal robotics and beyond.
Tesla Optimus
Create a general purpose, bi-pedal, autonomous humanoid robot capable of performing unsafe, repetitive or boring tasks. Achieving that end goal requires building the software stacks that enable balance, navigation, perception and interaction with the physical world. We’re hiring deep learning, computer vision, motion planning, controls, mechanical and general software engineers to solve some of our hardest engineering challenges.

FSD Chip
Build AI inference chips to run our Full Self-Driving software, considering every small architectural and micro-architectural improvement while squeezing maximum silicon performance-per-watt. Perform floor-planning, timing and power analyses on the design. Write robust tests and scoreboards to verify functionality and performance. Implement drivers to program and communicate with the chip, focusing on performance optimization and redundancy. Finally, validate the silicon chip and bring it to mass production in our vehicles.

Neural Networks
Apply cutting-edge research to train deep neural networks on problems ranging from perception to control. Our per-camera networks analyze raw images to perform semantic segmentation, object detection and monocular depth estimation. Our birds-eye-view networks take video from all cameras to output the road layout, static infrastructure and 3D objects directly in the top-down view. Our networks learn from the most complicated and diverse scenarios in the world, iteratively sourced from our fleet of millions of vehicles in real time. A full build of Self-Driving neural networks involves 48 networks that take 70,000 GPU hours to train 🔥. Together, they output 1,000 distinct tensors (predictions) at each timestep.
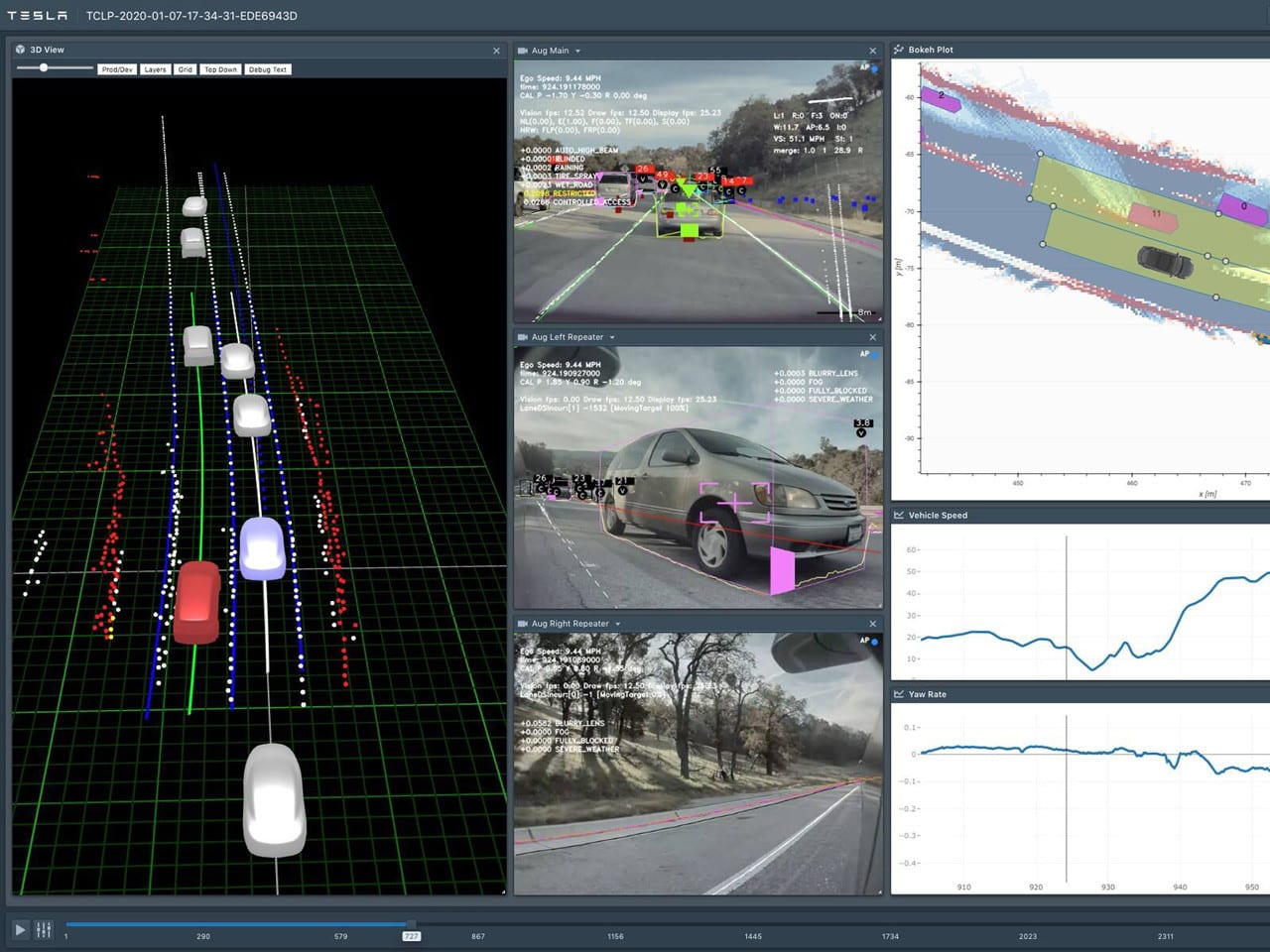
Autonomy Algorithms
Develop the core algorithms that drive the vehicle by creating a high-fidelity representation of the world and planning trajectories in that space. In order to train the neural networks to predict such representations, algorithmically create accurate and large-scale ground truth data by combining information from the vehicle's sensors across space and time. Use state-of-the-art techniques to build a robust planning and decision-making system that operates in complicated real-world situations under uncertainty. Evaluate your algorithms at the scale of the entire Tesla fleet.
Code Foundations
Throughput, latency, correctness and determinism are the main metrics we optimize our code for. Build the Self-Driving software foundations up from the lowest levels of the stack, tightly integrating with our custom hardware. Implement super-reliable bootloaders with support for over-the-air updates and bring up customized Linux kernels. Write fast, memory-efficient low-level code to capture high-frequency, high-volume data from our sensors, and to share it with multiple consumer processes— without impacting central memory access latency or starving critical functional code from CPU cycles. Squeeze and pipeline compute across a variety of hardware processing units, distributed across multiple system-on-chips.

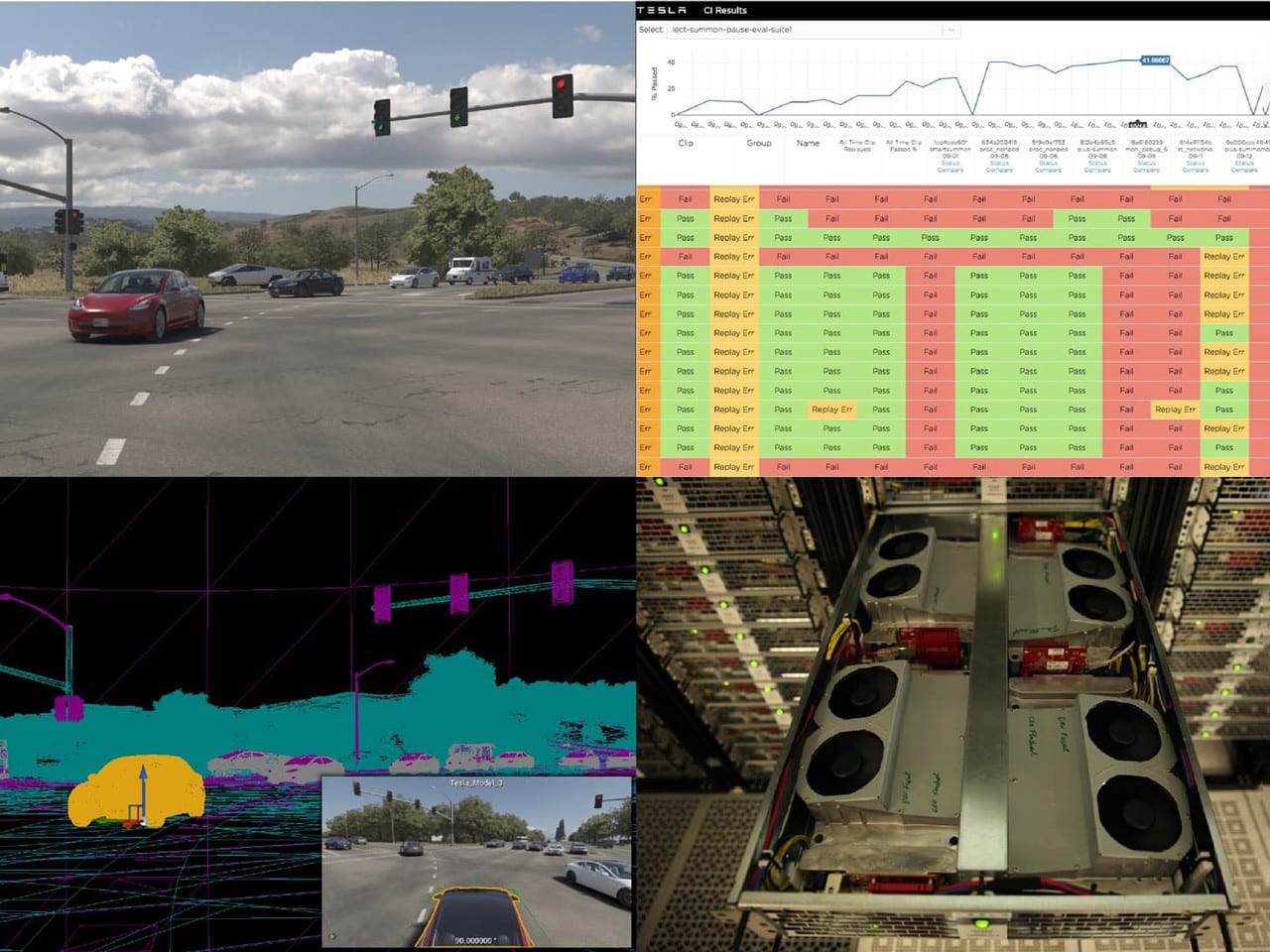
Evaluation Infrastructure
Build open- and closed-loop, hardware-in-the-loop evaluation tools and infrastructure at scale, to accelerate the pace of innovation, track performance improvements and prevent regressions. Leverage anonymized characteristic clips from our fleet and integrate them into large suites of test cases. Write code simulating our real-world environment, producing highly realistic graphics and other sensor data that feed our Self-Driving software for live debugging or automated testing.
Build the Future of Artificial Intelligence
Tesla will use the information provided in this form to process your inquiry in line with Tesla's Talent Privacy Notice.