IA y robótica
Desarrollamos y desplegamos autonomía a escala en vehículos, robots y más. Creemos que un enfoque basado en inteligencia artificial avanzada para la visión y la planificación, respaldado por el uso eficiente de hardware de inferencia, es la única forma de lograr una solución general para Full Self-Driving, robótica bípeda y más allá.
Tesla Optimus
Crear un robot humanoide autónomo, de propósito general, bípedo, capaz de realizar tareas inseguras, repetitivas o aburridas. Para lograr ese objetivo final, es necesario crear pilas de software que permitan el equilibrio, la navegación, la percepción y la interacción con el mundo físico. Estamos contratando ingenieros de aprendizaje profundo, visión por computadora, planificación de movimientos, controles, mecánicos y de software general para resolver algunos de nuestros desafíos de ingeniería más difíciles.

Chip FSD
Creamos chips de inferencia de IA para ejecutar nuestro software Full Self-Driving, teniendo en cuenta todas las pequeñas mejoras arquitectónicas y de micro arquitectura y, al mismo tiempo, nos esforzamos por extraer el máximo desempeño por watt del silicio. Realizamos la planificación del espacio, el cálculo de tiempos y los análisis de potencia en el diseño. Creamos pruebas y marcadores sólidos para verificar la funcionalidad y el rendimiento. Implementamos controladores para programar y comunicarse con el chip, con enfoque en la optimización del rendimiento y la redundancia. Finalmente, validamos el chip de silicio y lo llevamos a producción en masa en nuestros vehículos.

Redes neuronales
Aplicamos investigaciones de vanguardia para entrenar redes neuronales profundas en problemas que van desde la percepción hasta el control. Nuestras redes por cámara analizan imágenes sin procesar para realizar la segmentación semántica, la detección de objetos y la estimación de profundidad monocular. Nuestras redes a vista de pájaro toman videos de todas las cámaras para generar el diseño de la carretera, la infraestructura estática y los objetos 3D directamente en la vista de arriba hacia abajo. Nuestras redes aprenden de los escenarios más complicados y diversos del mundo, a partir de fuentes iterativas de nuestra flotilla de millones de vehículos en tiempo real. Una construcción completa de redes neuronales de conducción autónoma involucra 48 redes que tardan 70,000 horas de GPU en entrenarse 🔥. Juntos, generan 1,000 tensores (predicciones) distintos en cada paso de tiempo.
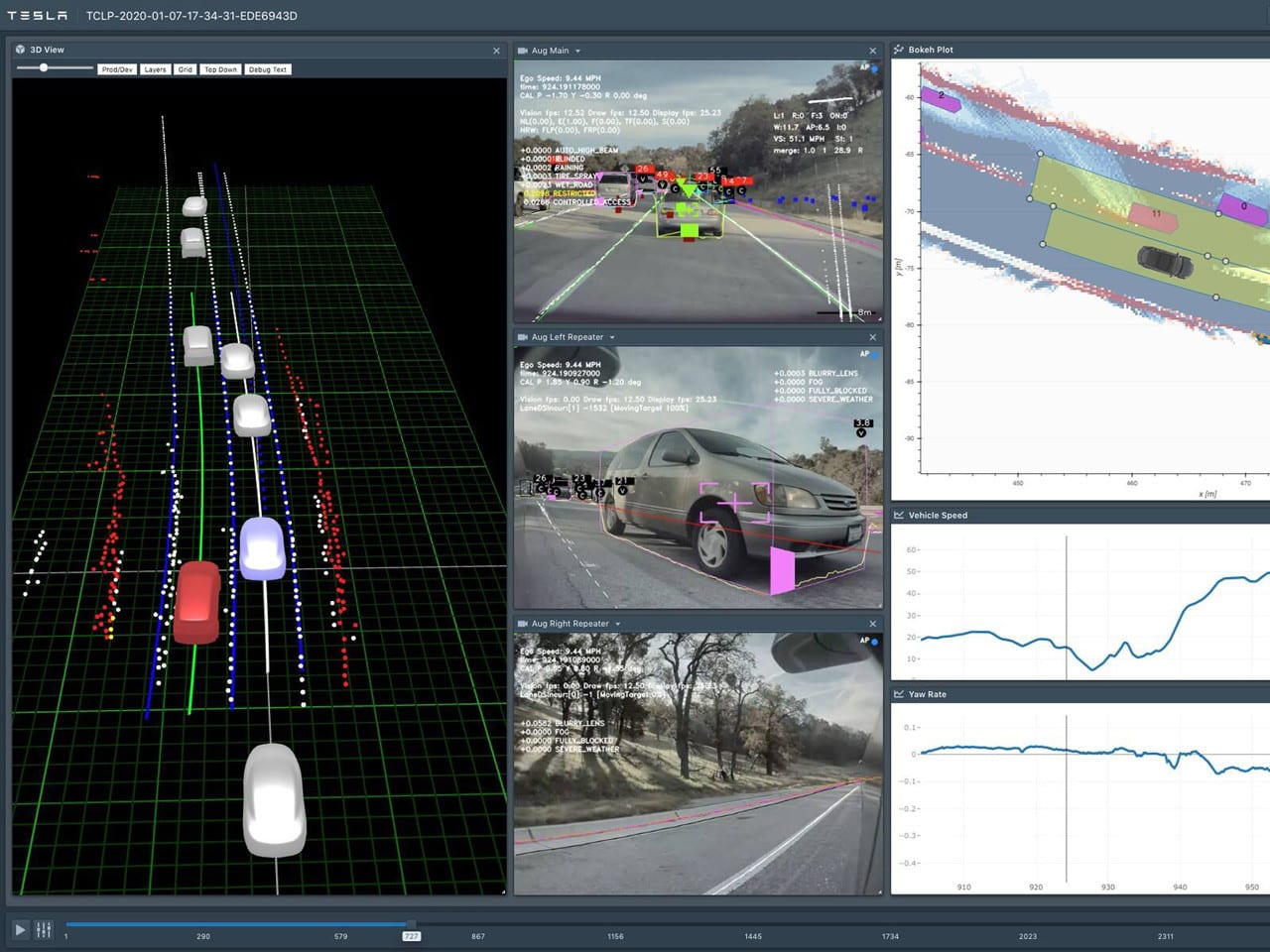
Algoritmos de autonomía
Desarrolla los algoritmos centrales que impulsan el vehículo mediante la creación de una representación de alta fidelidad del mundo y la planificación de trayectorias en ese espacio. Con el fin de entrenar las redes neuronales para predecir tales representaciones, crea algorítmicamente datos verídicos del terreno precisos y a gran escala mediante la combinación de información de los sensores del vehículo en el espacio y el tiempo. Utiliza técnicas de vanguardia para construir un sistema sólido de planificación y toma de decisiones que opere en situaciones complicadas del mundo real bajo incertidumbre. Evalúa tus algoritmos a la escala de toda la flotilla de Tesla.
Bases del código
El rendimiento, la latencia, la corrección y el determinismo son las principales métricas por las que optimizamos nuestro código. Construimos las bases del software de conducción autónoma desde los niveles más bajos de la pila, integrándolos estrechamente con nuestro hardware personalizado. Implementamos cargadores de arranque súper confiables con compatibilidad para actualizaciones inalámbricas y colocamos kernels de Linux personalizados. Escribimos rápidamente código de bajo nivel con uso eficiente de la memoria para capturar datos de alta frecuencia y gran volumen de nuestros sensores, y para compartirlos con varios procesos de consumo, sin afectar la latencia de acceso a la memoria central o desgastar el código funcional crítico de los ciclos de la CPU. Aprovechamos y hacemos más eficiente el cálculo en una variedad de unidades de proceso de hardware, que se distribuyen en varios sistemas en chips.

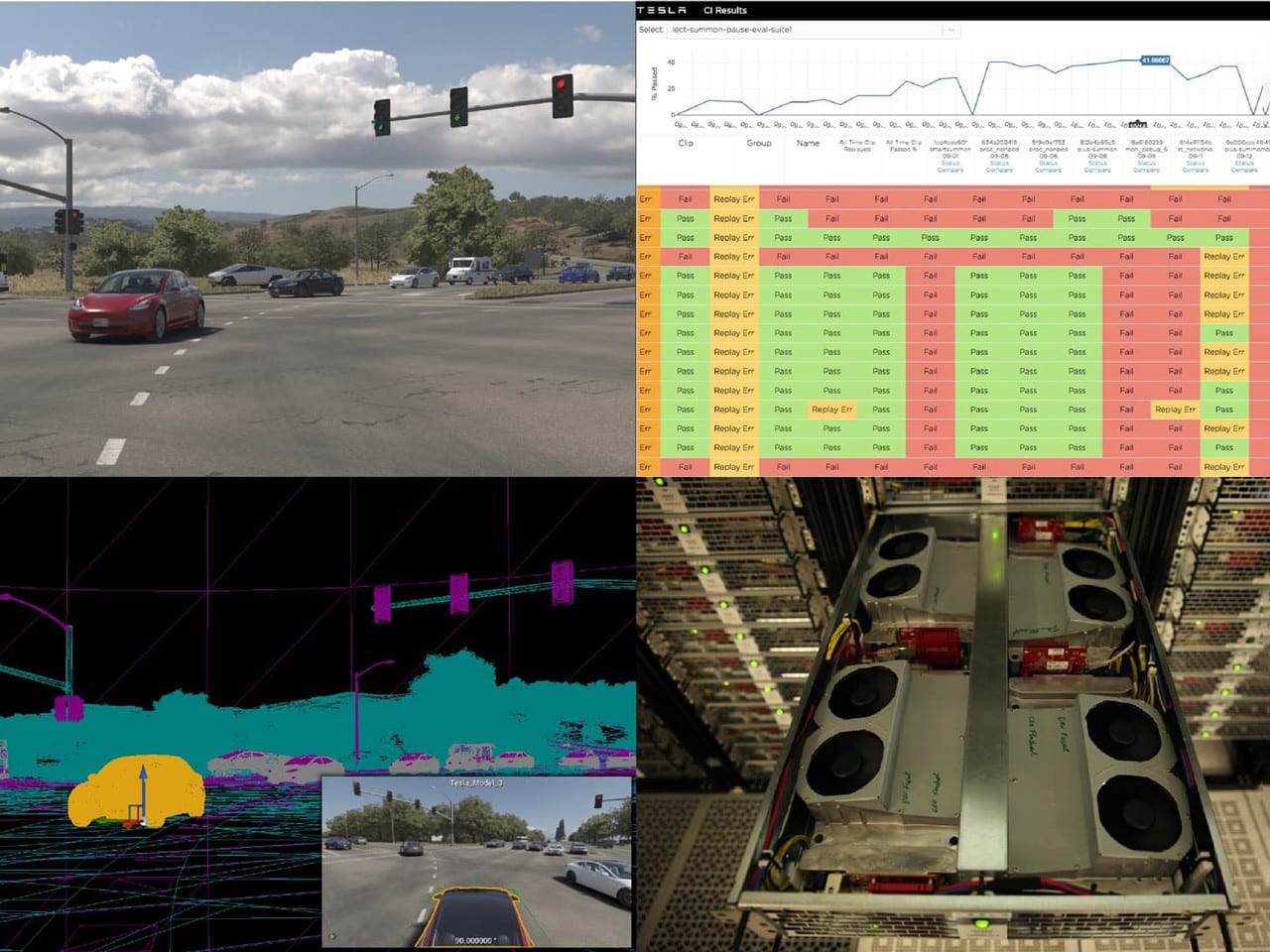
Evaluación de Infraestructura
Creamos herramientas e infraestructura de evaluación de hardware en el ciclo de circuito abierto y cerrado a escala, para acelerar el ritmo de la innovación, realizar un seguimiento de las mejoras de rendimiento y evitar regresiones. Aprovechamos los clips de características anónimos de nuestra flotilla y los integramos en grandes conjuntos de casos de prueba. Escribimos código que simula nuestro entorno del mundo rea y producimos gráficos altamente realistas y otros datos de sensores que alimentan nuestro software de conducción autónoma para depuración en vivo o pruebas automatizadas.