Tekoäly ja robotiikka
Kehitämme ja otamme käyttöön autonomiaa laajassa mittakaavassa ajoneuvoissa, roboteissa ja muissa laitteissa. Uskomme, että kehittyneeseen tekoälyyn perustuva lähestymistapa näkemiseen ja suunnitteluun yhdessä päättelylaitteiden tehokkaan käytön kanssa on ainoa keino tuottaa kattava yleisratkaisu, joka mahdollistaa Täysin itsestään ajavat ajoneuvot, kahdella jalalla kulkevat robotit ja monta muuta unelmaa.
Tesla Optimus
Luo yleiskäyttöinen, täysin itsenäinen robotti, joka kulkee ongelmitta kahdella jalalla ja sopii vaarallisiin, paljon toistoa sisältäviin tai tylsiin töihin. Tämän tavoitteen saavuttamista varten on kehitettävä ohjelmistopino, joka mahdollistaa tasapainon hallinnan, reittihaun, ympäristön havainnoinnin ja fyysisen vuorovaikutuksen ympäristön kanssa. Haemme tiimiimme syväoppimisen, konenäön, liikeratojen suunnittelun, ohjaustekniikan, mekaniikan ja yleisen ohjelmistotekniikan osaajia ratkaisemaan hankalimpia suunnitteluhaasteitamme.

FSD-siru
Kehitä tekoälyn päättelysiruja täysin itsestään ajavaa ohjelmistoamme varten alusta alkaen huomioimalla kaikki pienen ja mikroarkkitehtuurin parannukset samalla, kun etsit keinoja piisirun suorituskyvyn parantamiseen virrankulutusta lisäämättä. Analysoi mallia elementtien sijoittelun, ajoituksen ja tehon kannalta. Kirjoita vakaita testejä ja tulostauluja toiminnan ja suorituskyvyn tarkistamiseen. Toteuta ohjaimia sirun ohjelmointia ja ohjausta varten ja tee se optimaalista suorituskykyä ja virheensietoa painottaen. Validoi lopuksi piisiru ja vie se massatuotantoon ajoneuvoissamme.

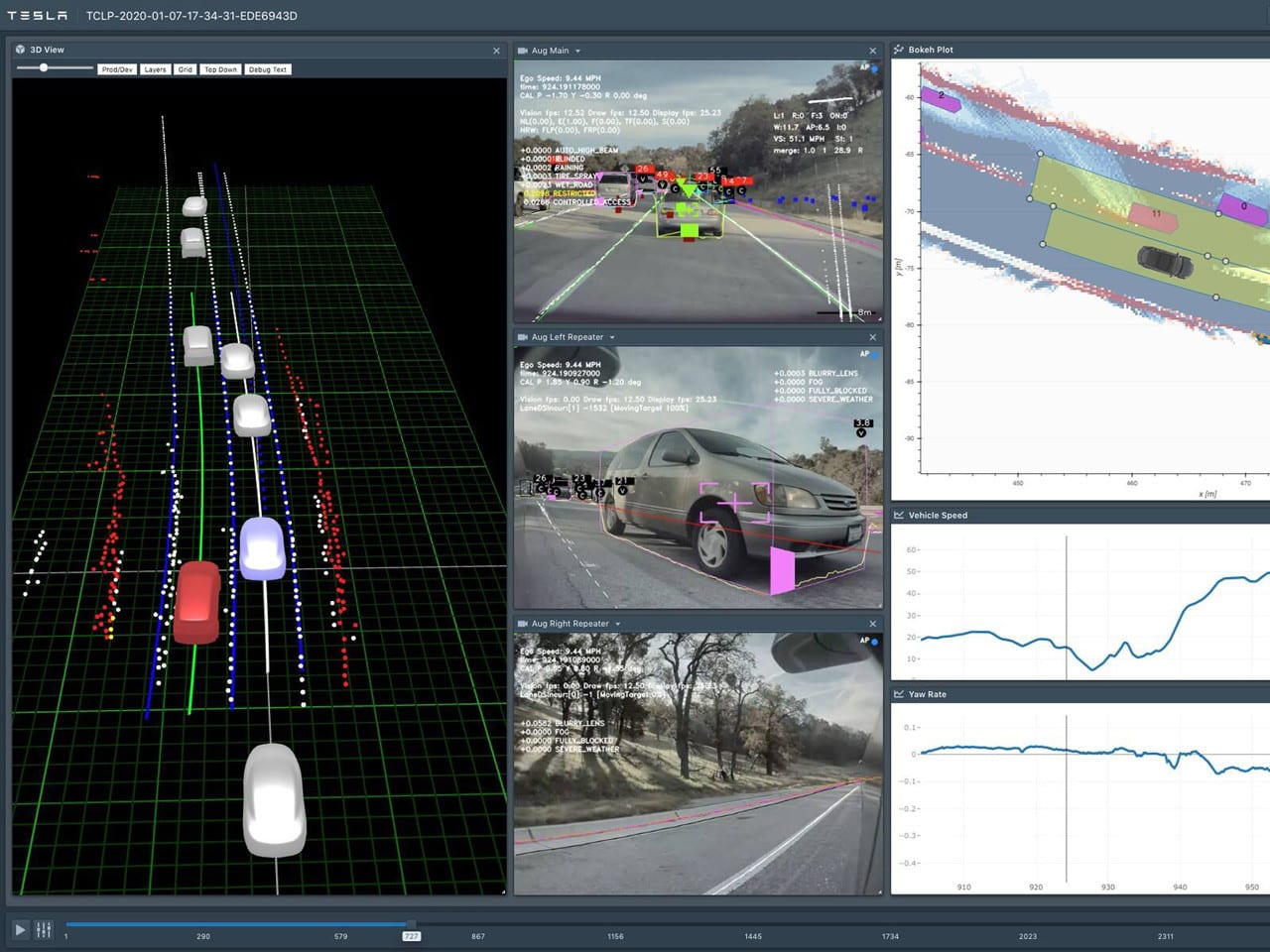
Neuraaliverkot
Hyödynnä viimeisimpiä tutkimustuloksia syvien neuroverkkojen kouluttamiseen havainnoinnin ja ohjauksen kaltaisten ongelmien ratkaisussa. Kamerakohtaiset verkkomme analysoivat raakakuvia semanttista segmentaatiota, kohteiden havaitsemista ja monokulaarista syvyysarviointia varten. Lintuperspektiiviä käyttävät verkkomme keräävät videokuvaa kaikista kameroista ja työstävät siitä tiekaavion, staattisen infrastruktuurin ja kolmiulotteisia kohteita suoraan ylänäkymään. Verkot oppivat monimutkaisista ja monipuolisista tositilanteista, jotka saadaan iteratiivisesti ja reaaliajassa miljoonista autoistamme ympäri maailman. Itsestään ajava -neuroverkkojen täyteen koontiversioon kuuluu 48 verkkoa, joiden kouluttamiseen kuluu 70 000 GPU-tuntia 🔥. Yhdessä ne kykenevät tuottamaan 1 000 erillistä tensoria (ennustetta) jokaisella aika-askeleella.
Autonomia-algoritmit
Kehitä ajoneuvoa ohjaavia ydinalgoritmeja luomalla korkealaatuisia esityksiä maailmasta ja suunnittelemalla liikeratoja kyseisissä tiloissa. Jotta neuroverkot voisivat opettaa ennustamaan tällaisia esityksiä, luo algoritmisesti tarkkaa ja laajamittaista totuustietoa yhdistämällä ajoneuvon antureista saatuja tietoja ajassa ja tilassa. Rakenna uusimpien tekniikoiden avulla vankka suunnittelu- ja päätöksentekojärjestelmä, joka toimii monimutkaisissa todellisissa tilanteissa epävarmuudessa. Arvioi algoritmisi koko Teslan kaluston tasolla.
Koodin perusta
Suorituskyky, latenssi, oikeellisuus ja määrittely ovat tärkeimpiä mittareita, joiden mukaan optimoimme koodimme. Rakenna Itsestään ajava -ohjelmiston perusta alimmilla tasoilla integroitumalla tiiviisti mukautettujen laitteistojemme kanssa. Ota käyttöön erittäin luotettavia käynnistyslataimia, jotka tukevat langattomia päivityksiä, ja hyödynnä mukautettuja Linux-ytimiä. Kirjoita nopeaa, muistia säästävää matalan tason koodia, jolla voit kerätä massadataa antureistamme ja jakaa ne useiden asiakasprosessien kanssa ilman että keskusmuistin käyttöviive kasvaa tai kriittiset toiminnalliset koodit eivät saa tarpeeksi suoritinaikaa käyttöönsä. Useille järjestelmäsiruille hajautettu squeeze- ja liukuhihnalaskenta erilaisissa suorittimissa.

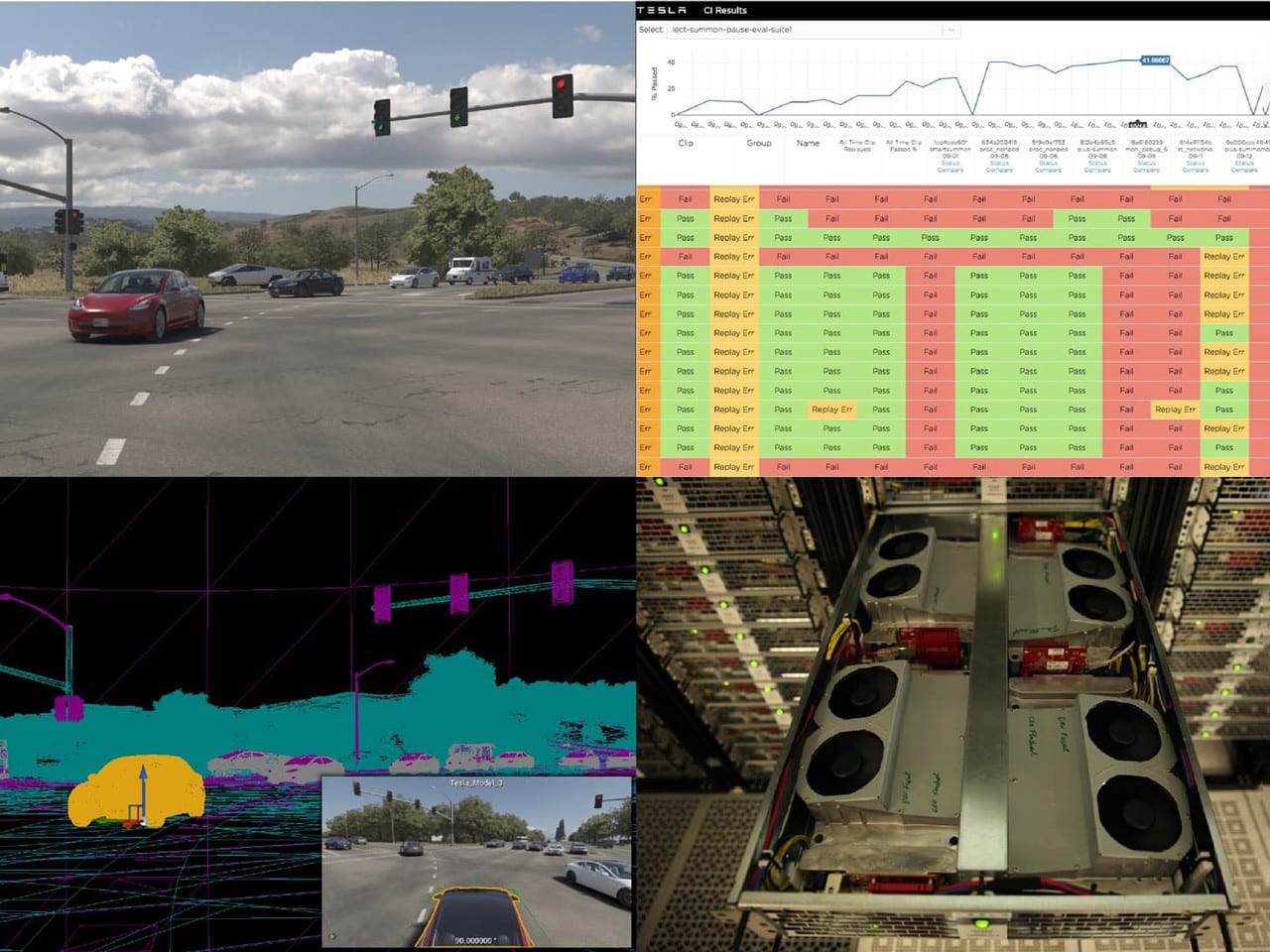
Arviointi-infrastruktuuri
Rakenna avoimen ja suljetun silmukan hardware-in-the-loop-arviointityökaluja ja -infrastruktuuria laajassa mittakaavassa, jotta voit edistää innovointia, seurata suorituskyvyn parannuksia ja estää regressioita. Hyödynnä kalustomme anonymisoituja ominaisuusleikkeitä ja integroi ne suuriin testitapaussarjoihin. Kirjoita koodia, joka simuloi todellista ympäristöämme ja tuottaa erittäin todentuntuista grafiikkaa ja muuta anturidataa, jota käytetään Itsestään ajava -ohjelmistomme reaaliaikaista virheenkorjausta tai automatisoitua testausta varten.
Rakenna tekoälyn tulevaisuutta
Tesla käsittelee kyselysi tässä lomakkeessa annettujen tietojen perusteella Tesla Talent -ohjelman tietosuojailmoituksen mukaisesti.