Gervigreind og vélfærafræði
Við þróum og útfærum sjálfvirkni í stórum stíl í ökutækjum, vélmennum og fleiru. Það er sannfæring okkar að nálgun sem byggist á framsækinni gervigreind í framtíðarsýn og áætlanagerð, studd skilvirkri notkun á ályktunarvélbúnaði, sé eina leiðin til að fá almenna lausn á Fullri sjálfkeyrslu, tvífættum vélmennum og fleiru.
Tesla Optimus
Að búa til tvífætt, sjálfvirkt vélmenni til almennrar notkunar sem getur sinnt óöruggum, endurteknum eða leiðinlegum verkefnum. Til að ná því markmiði þarf að byggja upp hugbúnaðarstafla sem tryggja jafnvægi, leiðsögn, skynjun og samskipti við hinn efnislega heim. Við viljum ráða hugbúnaðarverkfræðinga á sviði djúpnáms, tölvusjónar, hreyfiskipulags, stjórntækja og vélbúnaðar auk almennra hugbúnaðarverkfræðinga til að takast á við erfiðustu áskoranirnar okkar á sviði verkfræði.

FSD-tölvukubbur
Búa til gervigreindarkubba sem framkvæma ályktanir og keyra hugbúnað okkar fyrir fulla sjálfkeyrslu. Íhuga allar smávægilegar endurbætur á hönnun og örhönnun um leið og reynt er að ná fram hámarksárangri á sílikoninu á hvert vatt. Hönnun fyrir gólfið, tímasetning og aflgreining á hönnuninni. Skrifa öflug próf og stigatöflur til að staðfesta virkni og afköst. Innleiða rekla til að forrita og eiga samskipti við örflöguna með áherslu á fínstillingu á afköstum og það að minnka umfremd. Sannprófa loks örflöguna og færa hana í fjöldaframleiðslu í ökutækjum okkar.

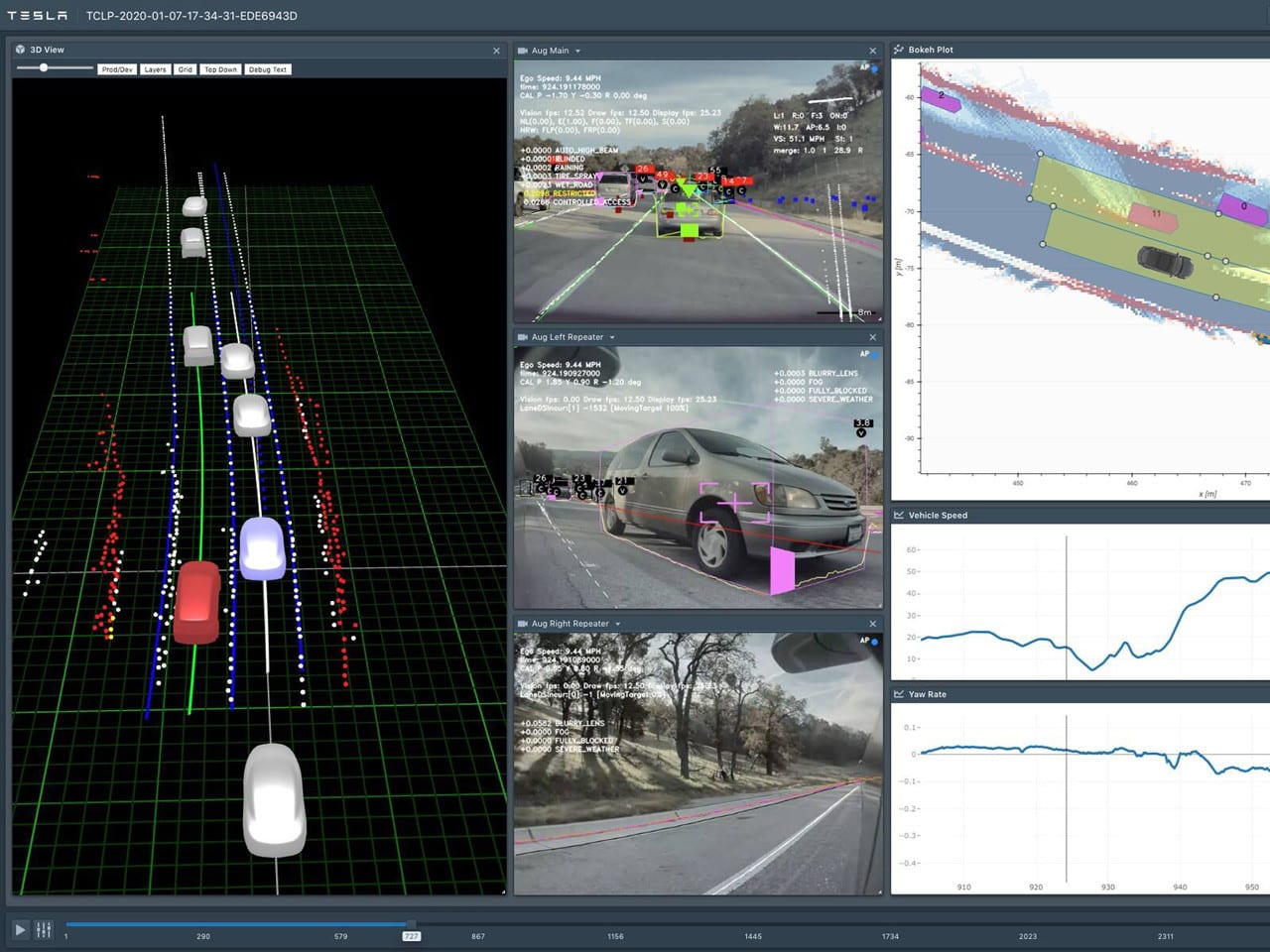
Tauganet
Beita framsæknum rannsóknum til að þjálfa flókin tauganet í að leysa vandamál tengd hlutum eins og skynjun og stýringu. Myndavélakerfi okkar greina hrámyndir og framkvæma merkingarlega greiningu, hlutagreiningu og sjóndýptarmat. Yfirlitsmyndakerfi okkar taka myndefni frá öllum myndavélum og birta útlit vegar, innviði og þrívíða hluti með beinum hætti. Net okkar læra af einhverjum þeim flóknustu og margbreytilegustu aðstæðum sem fyrirfinnast í heiminum og greina gögn frá flota sem telur milljónir ökutækja í rauntíma. Fullgert sjálfkeyrslutauganet nær til 48 netkerfa og 70.000 GPU-klukkustunda þjálfunar 🔥. Saman gera þau 1000 mismunandi spáreikninga í hverju tímaskrefi.
Sjálfvirknialgóriþmar
Þróa grunnalgrím sem keyra bílinn með því að setja saman hágæðaeftirmynd af veröldinni og spálíkön fyrir það rými. Til að þjálfa tauganetin til að sjá fyrir slíkar eftirmyndir eru búin til nákvæm og umfangsmikil raungögn með aðstoð algóríms með því að sameina upplýsingar úr skynjurum bílsins í tíma og rúmi. Nota nýjustu tækni til að smíða örugg skipulags- og ákvörðunarkerfi sem virka í flóknum raunverulegum aðstæðum þar sem óvissa er fyrir hendi. Meta algrím með hliðsjón af öllum Tesla-flotanum.
Kóðagrunnur
Gegnstreymi, biðtími, sannkvæmni og löghyggja eru helstu mæligildin sem við notum til að fínstilla kóðann okkar. Smíða sjálfkeyrsluhugbúnaðinn frá grunni og samþætta við sérsniðinn vélbúnað okkar. Innleiða mjög áreiðanleg ræsihleðsluforrit með stuðningi fyrir þráðlausar hugbúnaðaruppfærslur og nota sérsniðna Linux-kjarna. Skrifa hraðvirkan og fyrirferðalítinn lágstigskóða sem nær utan um mikið magn hraðvirkra gagna úr skynjurum okkar og deilir þeim með ýmsum notkunarferlum — án þess að slíkt hafi áhrif á aðgang að miðlægu minni eða hefti aðgang virknikóða að örgjörvalotum. Fullnýta og straumlínulaga tölvuvinnslu á milli ólíkra vélbúnaðarvinnslueininga yfir mörg örflögukerfi.

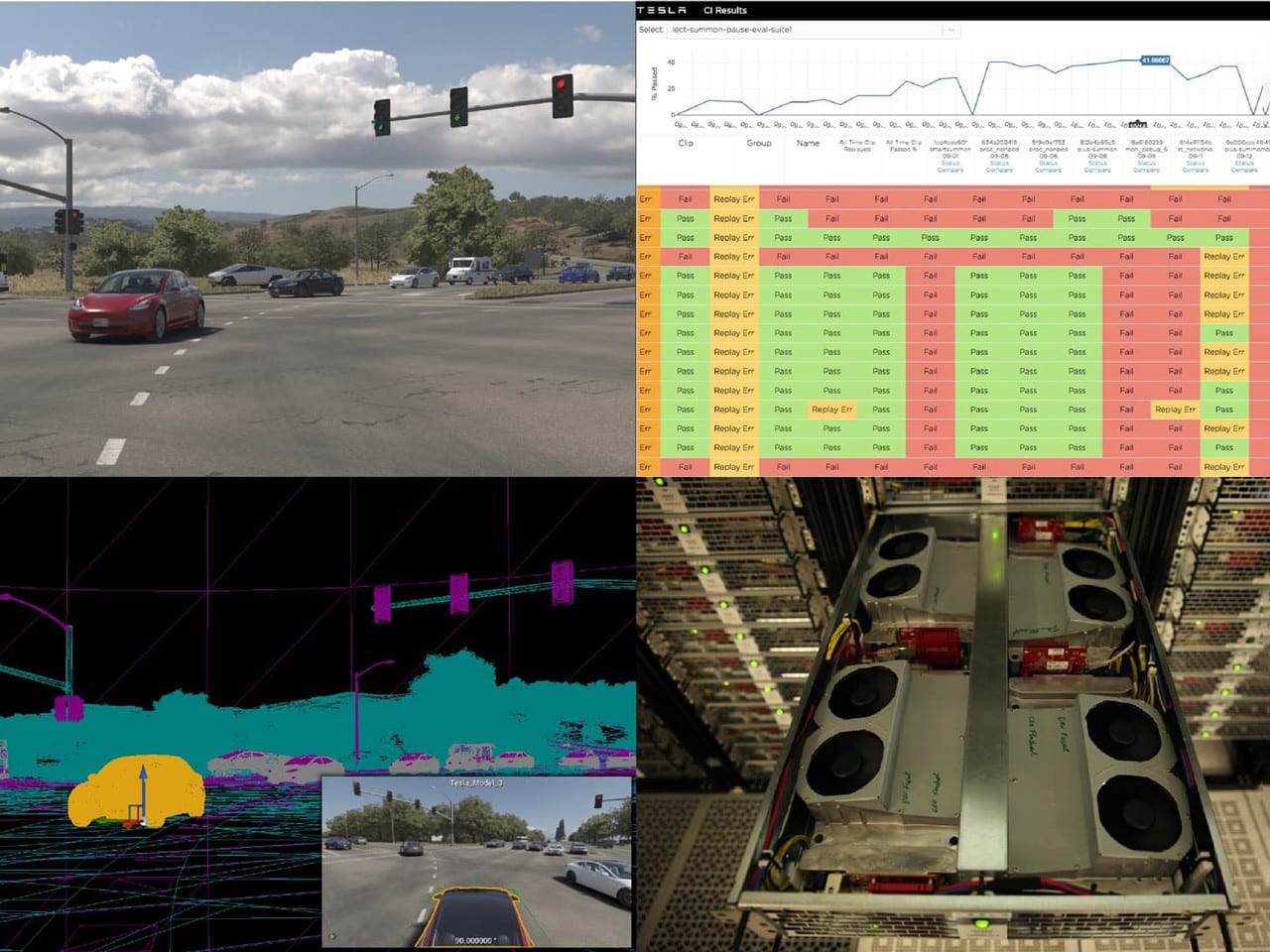
Matsinnviðir
Byggja HIL-matsverkfæri og innviði fyrir opin og lokuð kerfi til að hraða nýsköpun, skrá endurbætur á afköstum og koma í veg fyrir afturför. Vinna úr dæmigerðum, nafnlausum myndbútum úr flotanum og sameina þá í stóran hóp próftilvika. Skrifa kóða sem hermir eftir raunumhverfi, til að búa til mjög raunsætt myndefni og önnur skynjaragögn sem senda efni í sjálfkeyrsluhugbúnaðinn okkar fyrir kembingu eða sjálfvirkar prófanir í rauntíma.
Smíðaðu gervigreind framtíðarinnar
Tesla mun nota upplýsingarnar á þessu eyðublaði til að vinna úr fyrirspurn þinni í samræmi við persónuverndaryfirlýsingu fyrir hæfileikafólk Tesla.