AIとロボティクス
私たちは自動車やロボットなどの分野において、オートノミーを大規模に開発し、展開しています。ビジョンとプランニングのための高度なAIに基づくアプローチが、推論ハードウェアの効率的な使用の元となり、Full Self-Driving、二足歩行ロボット、その先の一般的なソリューションを実現する唯一の方法であると信じています。
Teslaオプティマス
危険な作業や繰り返し作業、退屈な作業を実行できる、汎用の二足歩行自律ヒューマノイドロボットを製作します。この最終目標を達成するには、バランス、ナビゲーション、知覚、そして現実世界との相互作用を可能にするソフトウェアスタックを構築する必要があります。私たちは、ディープラーニング、コンピュータービジョン、モーションプランニング、コントロール、メカニカルおよび一般ソフトウェアエンジニアを採用し、エンジニアリングにおける最も困難な課題を解決しています。

FSDチップ
1ワットあたりのシリコン性能を最大化しつつ、あらゆる小型アーキテクチャおよびマイクロ アーキテクチャの改善を考慮しながら、AI自動推論チップを構築して当社の完全自動運転ソフトウェアを実行します。デザインのフロアプラン、タイミング、消費電力解析を行います。機能とパフォーマンスを検証するための堅牢なテストとスコアボードを作成します。パフォーマンスの最適化と冗長性に重点を置いて、チップをプログラムし通信するためのドライバーを実装します。最後に、シリコンチップを検証し、それを当社の車両で量産に投入します。

ニューラル ネットワーク
最先端の研究を応用して、知覚から制御までにわたる問題についてディープニューラルネットワークをトレーニングします。Teslaのカメラごとのネットワークは生の画像を分析し、セマンティックセグメンテーション、物体検出、単眼深度推定を行います。Teslaの鳥瞰図ネットワークは、すべてのカメラからビデオを取得し、道路レイアウト、静的インフラストラクチャ、3Dオブジェクトをトップダウンビューで直接出力します。私たちのネットワークは、数百万台の車両からリアルタイムで繰り返し情報を得て、世界で最も複雑で多様なシナリオから学んでいます。ドライブアシスト ニューラル ネットワークを完全に構築するには、トレーニングに70,000 GPUの時間がかかる48のネットワークが必要です🔥。これらを合わせて、タイムステップごとに1,000個の異なるテンソル(予測)を出力します。
オートノミーアルゴリズム
世界を忠実に再現しその空間での進路を計画することで車両を運転するための、コアアルゴリズムを開発します。そのような再現を予測するようにニューラル ネットワークをトレーニングするため、車両センサーからの空間と時間に渡る情報を組み合わせることで、正確で大規模な実際のデータをアルゴリズム的に作成します。最先端の技術を使用して、不確実な実際の複雑な状況で動作する堅牢な計画と意思決定システムを構築します。Teslaフリート全体の規模でアルゴリズムを評価します。
コードの基礎
スループット、レイテンシー、正確性、決定性は、コードを最適化する主な指標です。カスタムのハードウェアとしっかりと統合することで、ドライブアシスト ソフトウェアの基盤を最低レベルから構築します。無線アップデートをサポートし、カスタマイズされた Linux カーネルを起動することで、信頼性の高いアップデートを提供します。Teslaのセンサーから高周波数・大容量データを取得し、それを複数の消費者プロセスと共有するために、高速でメモリ効率の高い低レベルのコードを作成します。ただし、中央メモリアクセスのレイテンシーやCPUサイクルによる不安定な機能コードには影響を与えません。さまざまなハードウェア処理ユニットをまたいで、複数のシステム オン チップに分散される。

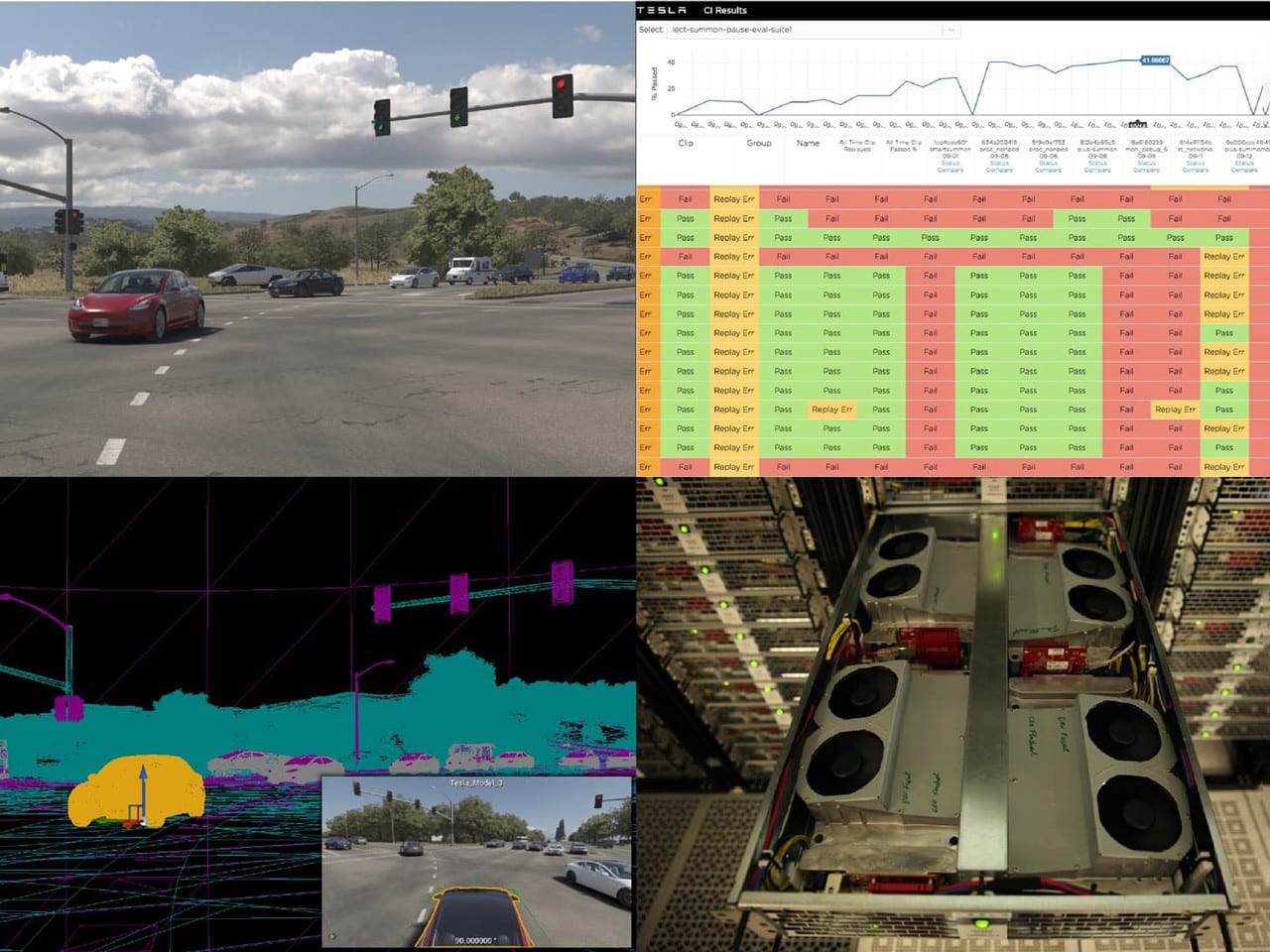
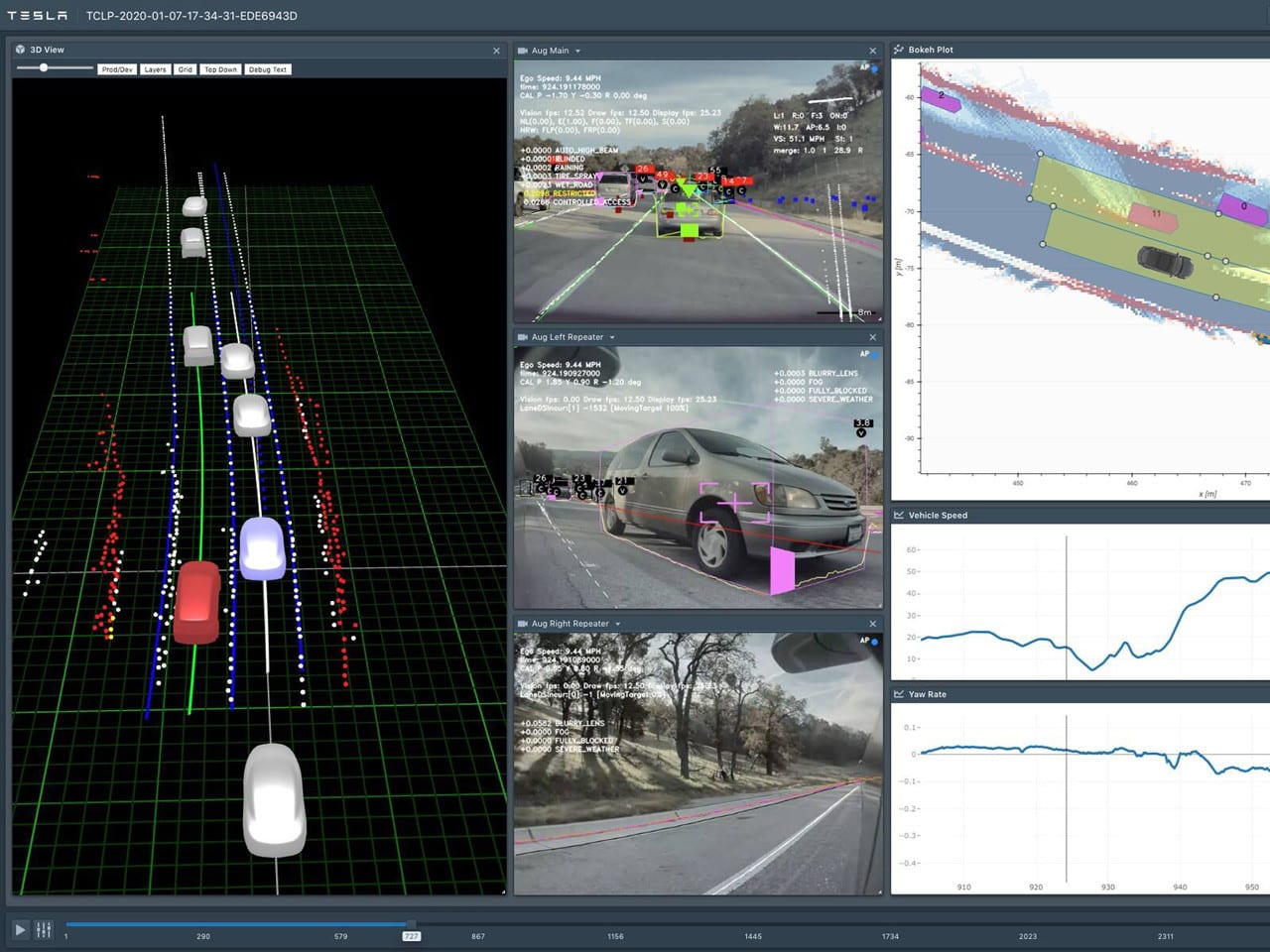
評価基盤
イノベーションのスピードを加速し、パフォーマンスの向上を追跡し、後退を防ぐために、オープンおよびクローズド ループ、ハードウェアインザループ評価ツール、およびインフラストラクチャを大規模に構築します。フリートから匿名化された特性クリップを活用し、大規模なテストケースに統合します。私たちの実際の環境をシミュレーションするコードを作成し、非常に現実的なグラフィックや他のセンサーデータを生成し、そのデータをライブデバッグや自動テストのためにTeslaのドライブアシストソフトウェアに供給します。