AI og robotikk
Vi utvikler og distribuerer autonomi i stor skala for bruk i biler, roboter og mer. Vi tror at en tilnærming basert på avansert AI for visjon og planlegging støttet av effektiv bruk av inferensteknikk, er den eneste måten å oppnå en generell løsning for Selvkjørende funksjoner, bruk av tobeinte roboter og mer til.
Tesla Optimus
Lag en generell, autonom, humanoid biped robot som er i stand til å utføre usikre, repeterende eller kjedelige oppgaver. For å oppnå det endelige målet må man bygge programvarestakkene som muliggjør balanse, navigasjon, oppfatning og samhandling med den fysiske verden. Vi ansetter ingeniører som skal jobbe med dyp læring, datasyn, bevegelsesplanlegging og kontrollere og utvikle mekanisk- og generell programvare for å løse noen av våre vanskeligste tekniske utfordringer.

FSD-brikke
Bygg AI-avledede brikker for å kjøre programvaren vår for fullverdig selvkjøring. Ta alle, selv de minste, arkitektoniske forbedringene med i betraktning, og utnytt brikkenes ytelse per watt til det ytterste. Lag detaljtegninger, tidsstudier og effektanalyser på designen. Skriv robuste tester og resultattavler for å verifisere funksjonalitet og ytelse. Implementer drivere for å programmere og kommunisere med brikken med fokus på ytelsesoptimalisering og redundans. Når alt er gjort, godkjenn silisiumbrikken og bring den til masseproduksjon i bilene våre.

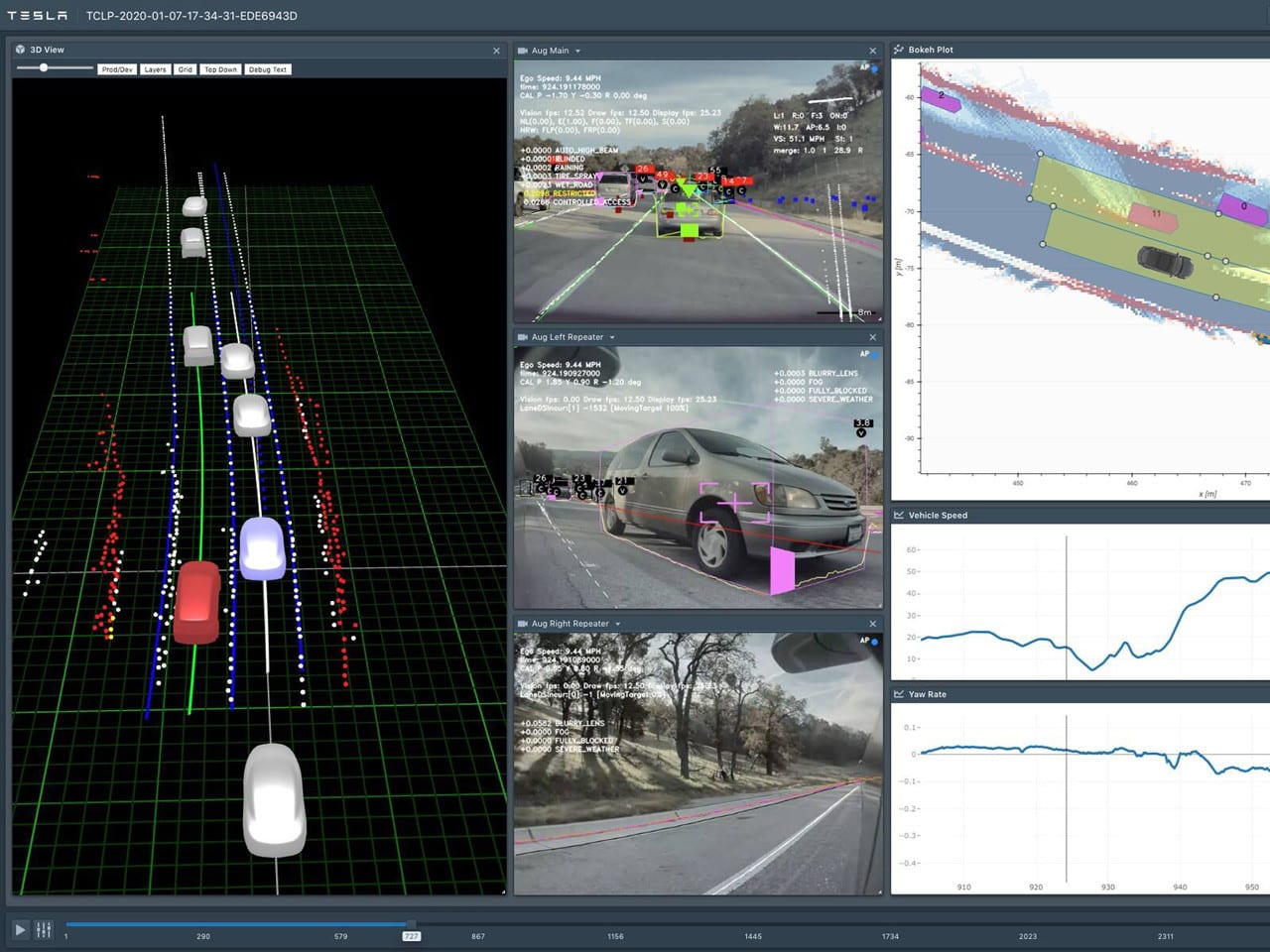
Neural nettverk
Bruk avansert forskning for å trene dype nevrale nettverk om problemer som spenner fra oppfatning til kontroll. Våre per-kamera-nettverk analyserer råbilder for å utføre semantisk segmentering, objektgjenkjenning og monokulær dybdeestimering. Våre fugleperspektiv-nettverk tar video fra alle kameraer for å generere veinettet, statisk infrastruktur og 3D-objekter direkte i top-down-visningen. Nettverkene våre lærer av de mest kompliserte og mangfoldige scenariene i verden, hentet jevnlig fra bilparken vår med millioner av biler i sanntid. En fullverdig versjon av selvkjørende nevrale nettverk involverer 48 nettverk som det tar 70 000 GPU-timer å trene 🔥. Sammen avgir de 1000 ulike tensorer (spådommer) ved hvert tidspunkt.
Autonomitetsalgoritmer
Utvikle kjernealgoritmene som kjører bilen ved å lage en høyoppløslig representasjon av verden og planlegge baner i det området. For å trene de nevrale nettverkene til å forutsi slike representasjoner bruker du algoritmer til å danne nøyaktige og virkelighetsnære terrengdata i stor skala ved å kombinere informasjon fra bilens sensorer i tid og rom. Bruk hypermoderne teknikker til å bygge et robust system for planlegging og beslutningstaking som fungerer i kompliserte, virkelige situasjoner som kan være tvetydige. Evaluer algoritmene dine over hele Tesla-bilparken.
Kodegrunnlag
Gjennomstrømning, ventetid, riktighet og determinisme er de viktigste målingene vi optimaliserer koden vår for. Bygge den selvkjørende programvarefundamentet fra de laveste nivåene, tett integrert med vår tilpassede hardware. Implementere superpålitelige oppstartslastere med støtte for OTA-oppdateringer og få frem tilpassede linuxkjerner. Skrive rask, minneeffektiv kode på lavt nivå for å fange opp data med høy frekvens og høye volum fra sensorene våre, og for å dele dem med flere forbrukerprosesser – uten å påvirke forsinkelsen for tilgang til sentralminne eller sulte opp kritisk funksjonell kode fra prosessorsykluser. Beregne med klem- og pipelinemetoder på tvers av en rekke hardware-prosessenheter, distribuert på tvers av flere integrert krets-systemer.

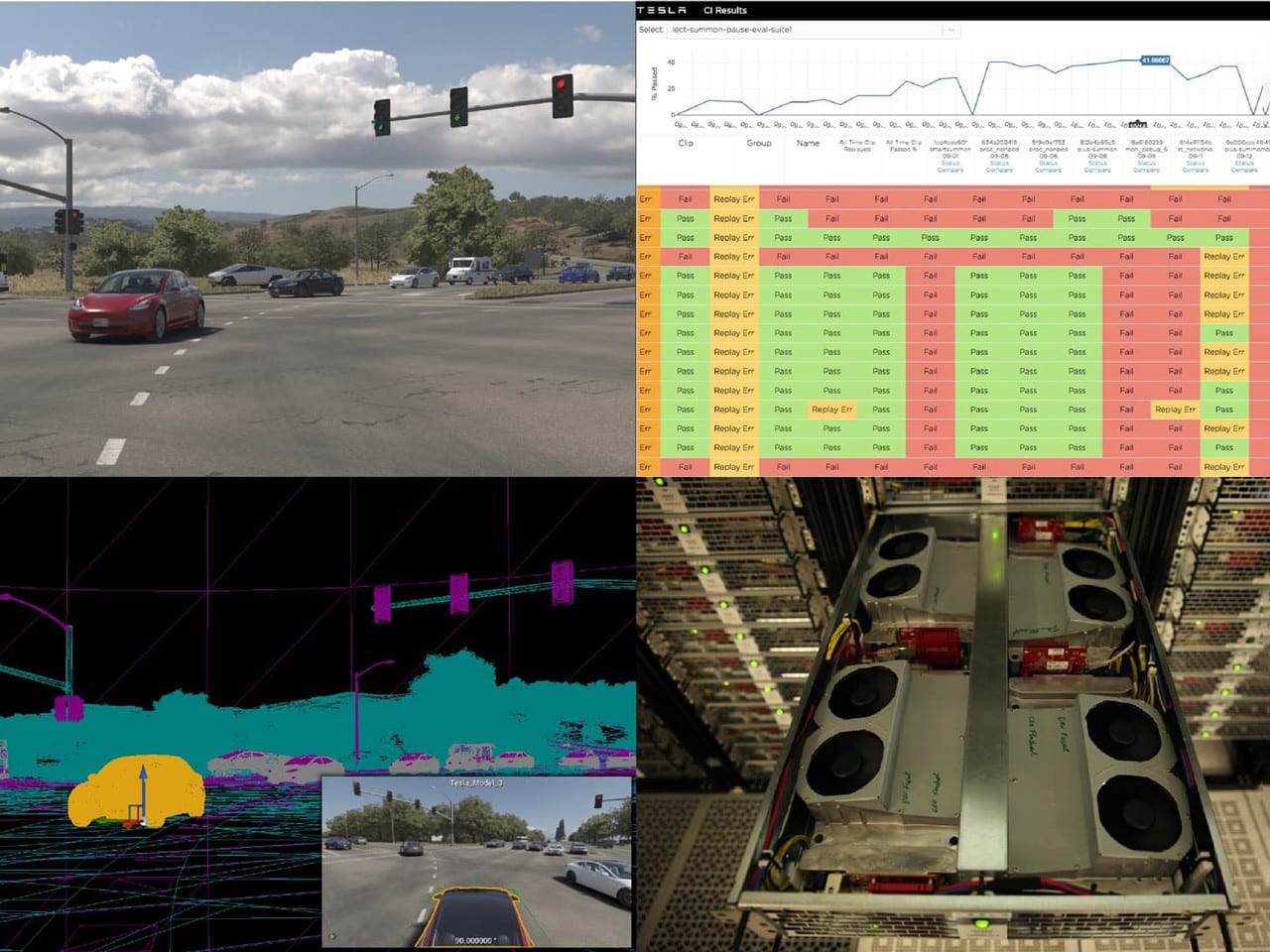
Evaluering av infrastruktur
Bygge evalueringsverktøy med åpen og lukket sløyfe, hardware-in-the-loop-teknologiske evalueringsverktøy og skalert infrastruktur for å øke innovasjonshastigheten, spore ytelsesforbedringer og forhindre regresjoner. Dra nytte av anonymiserte karakteristiske klipp fra bilparken vår og integrere dem i store serier med testsaker. Skrive kode som simulerer det virkelige miljøet, og produsere svært realistisk grafikk og andre sensordata som mater den selvkjørende programvaren vår for feilsøking eller automatisert testing i sanntid.
Bygg fremtidens kunstige intelligens
Tesla vil bruke informasjonen oppgitt i dette skjemaet, til å behandle henvendelsen din i tråd med Teslas personvernerklæring for talenter.