AI 人工智慧與機器人
Tesla 正大規模地在車輛、機器人等領域開發和部署自主運作系統。我們深信以先進人工智慧為基礎的願景和規劃,藉助推理硬體的有效運用,是實現全自動輔助駕駛、雙足機器人及其他應用開發普及的唯一途徑。
Tesla Optimus
創造通用、可兩腳步行的自主人形機械人,讓其能夠執行不安全、重複或沉悶的任務。要達到此最終目標,必須先建立能夠達到平衡、導航、感知以及與現實世界互動的軟體架構。我們正在招聘深度學習、電腦視覺、動作規劃、控制、機械以及一般軟體工程師,來解決某些最嚴峻的工程挑戰。

FSD 晶片
建置 AI 推論晶片以執行我們的「全自動輔助駕駛(FSD)」軟體,充分改良每個小型架構與微型架構,同時努力提升每瓦電力最大矽晶效能。晶片設計涉及平面規劃、時間和功率分析。撰寫和制定強健的測試和指標以驗證功能和效能。實作驅動程式以供編程以及和晶片通訊,並專注於性能優化和冗餘設計。驗證矽晶片後進入量產,為車輛使用。

神經網路
應用劃時代的研究與技術訓練深層神經網路,處理從感知到控制的問題。我們的每個攝影機網路都會分析原始影像以進行語義分析、物體偵測和單眼深度計算。我們的鳥瞰網絡可從所有攝影機擷取影像,從高處往下看的視角輸出道路佈局、靜態基礎架構以及 3D 物體。我們的網路會從世界上最複雜多樣的情況中學習,並以迭代方式擷取自 Tesla 數百萬部車輛的即時資訊。完整的自動駕駛神經網路包含 48 個網路,花費 70,000 GPU 小時來訓練 🔥,共在每個時步輸出 1,000 個不同的張量 (預測值)。
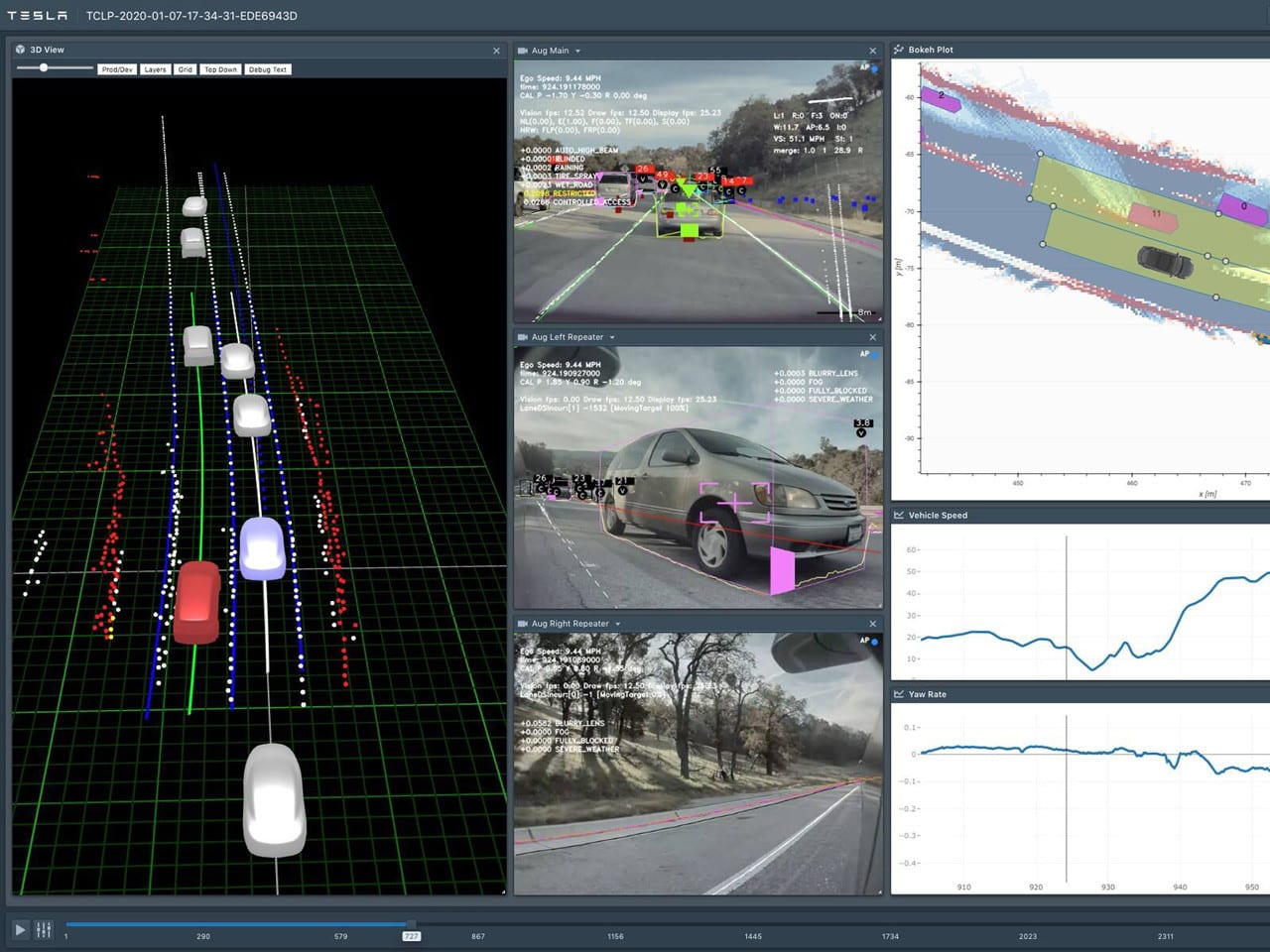
自駕演算法
透過建立世界影像的高傳真圖示並規劃該空間中的運動軌道來開發驅動車輛的核心演算法。為了訓練神經網路預測這類表現,透過結合來自車輛感測器的空間與時間資訊,以演算法建立精確的大規模地面實況資料。使用最先進的技術建立一個強大的規劃和決策系統,能夠在複雜現實世界情況和不確定性中運作。在整個 Tesla 車隊範圍內評估您的演算法。
程式碼基礎
流通量、延遲性、正確性與決定性是我們最佳化程式碼的主要指標。自動駕駛軟體從堆疊的最底層建立基礎,並與 Tesla 客製化硬體緊密整合。透過 OTA 空中下載更新支援並導入客製化 Linux 核心,實現極度可靠的開機載入程式。透過編寫快速且節省儲存空間的底層程式碼,從感測器擷取大量且高頻率使用的資料,並分享給多個取用程序。該過程不會影響中央記憶體存取延遲或因 CPU 週期而使關鍵功能程式碼遲滯。運算可橫跨各種硬體運算單元,在多個系統晶片中分佈。

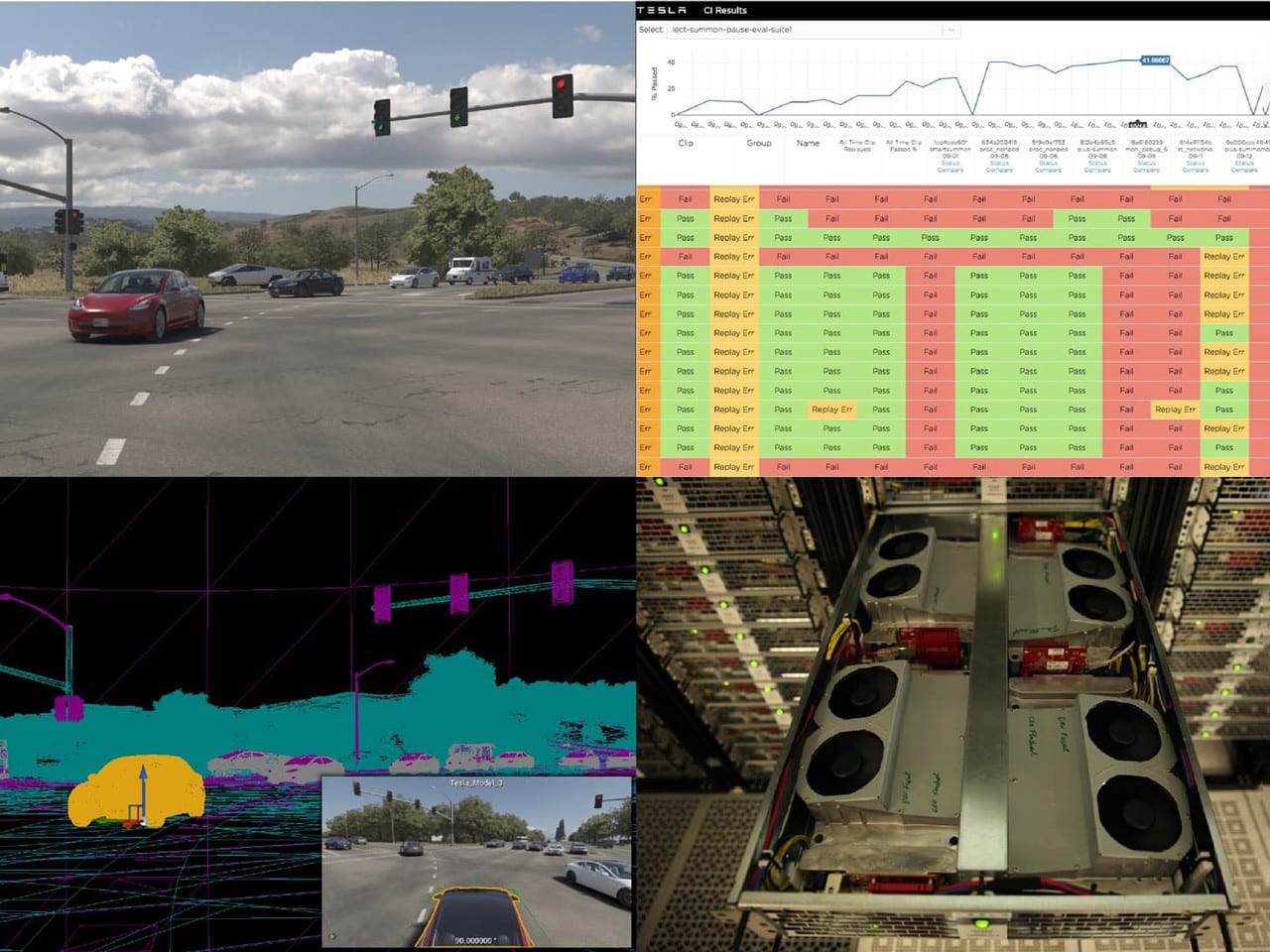
評估基礎架構
大規模建構開和閉迴路、迴路內建硬體評估工具和基礎設施以加快創新步伐,追蹤效能改進並防止退化。透過車隊提供的匿名特徵記錄片段,將其整合到大型測試案例組件中。編寫模擬真實環境的程式碼,產生高解析度圖形和其他感測器資料,為我們的自動駕駛軟體提供即時除錯或自動化測試。